The competition was held in Vienna during the conference days. Teams executed a set of human-to-robot handover configurations with unknown objects that organizers provided on-site only once.
The set of objects for the competition consists of containers for food and liquids, such as drinking cups, drinking glasses, food boxes, etc. The containers may be filled with a content different from rice and with a different amount from the set used for the qualification phase. The containers and content types and amounts are unknown to the teams to test the generalisation capabilities of the system to adapt to novel and unseen objects.
Notes on results and scoring:
- Teams AIRLab and Shakey’s Legacy had technical issues and could complete only a few configurations. Not listed in this leaderboard.
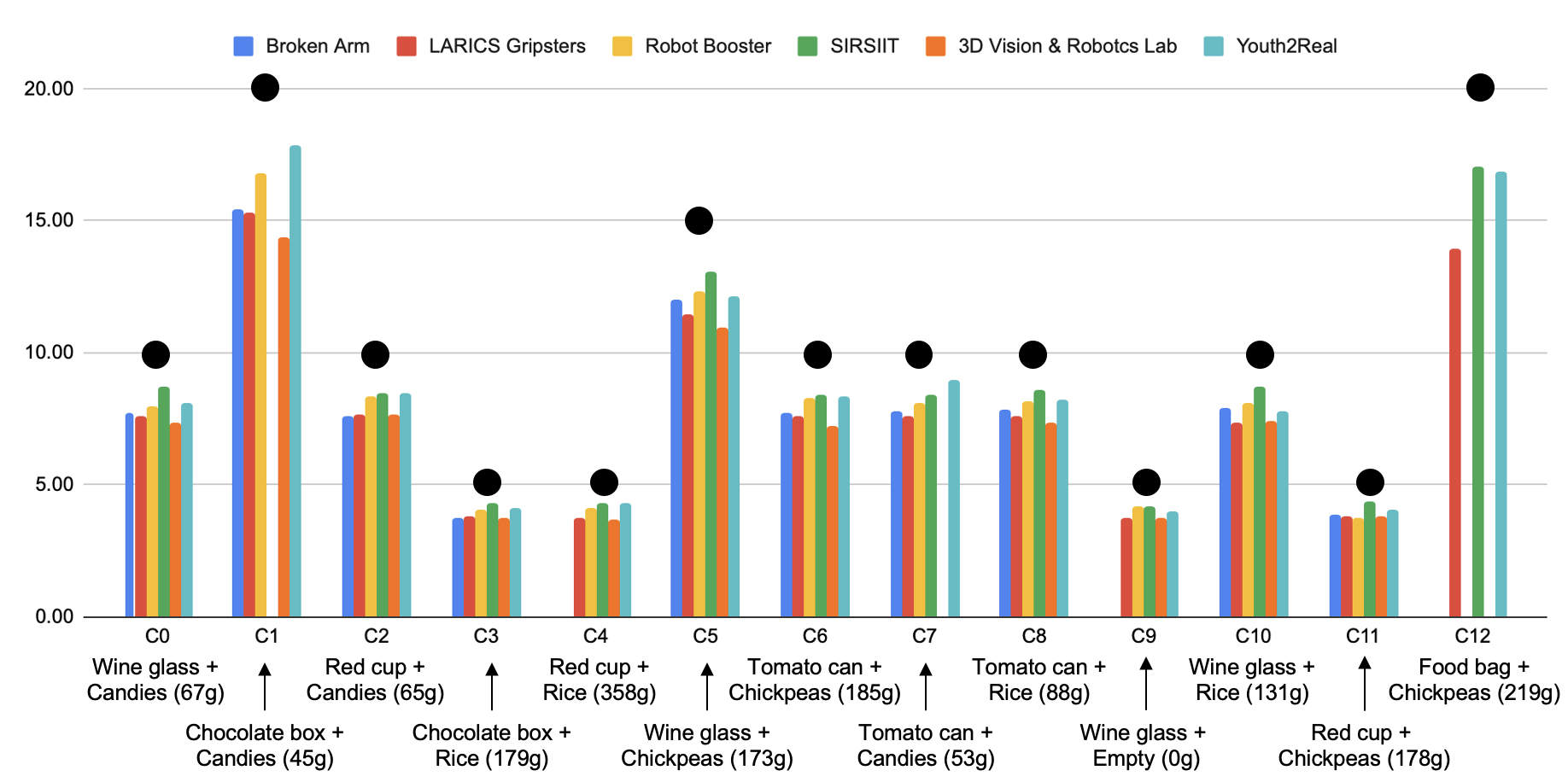
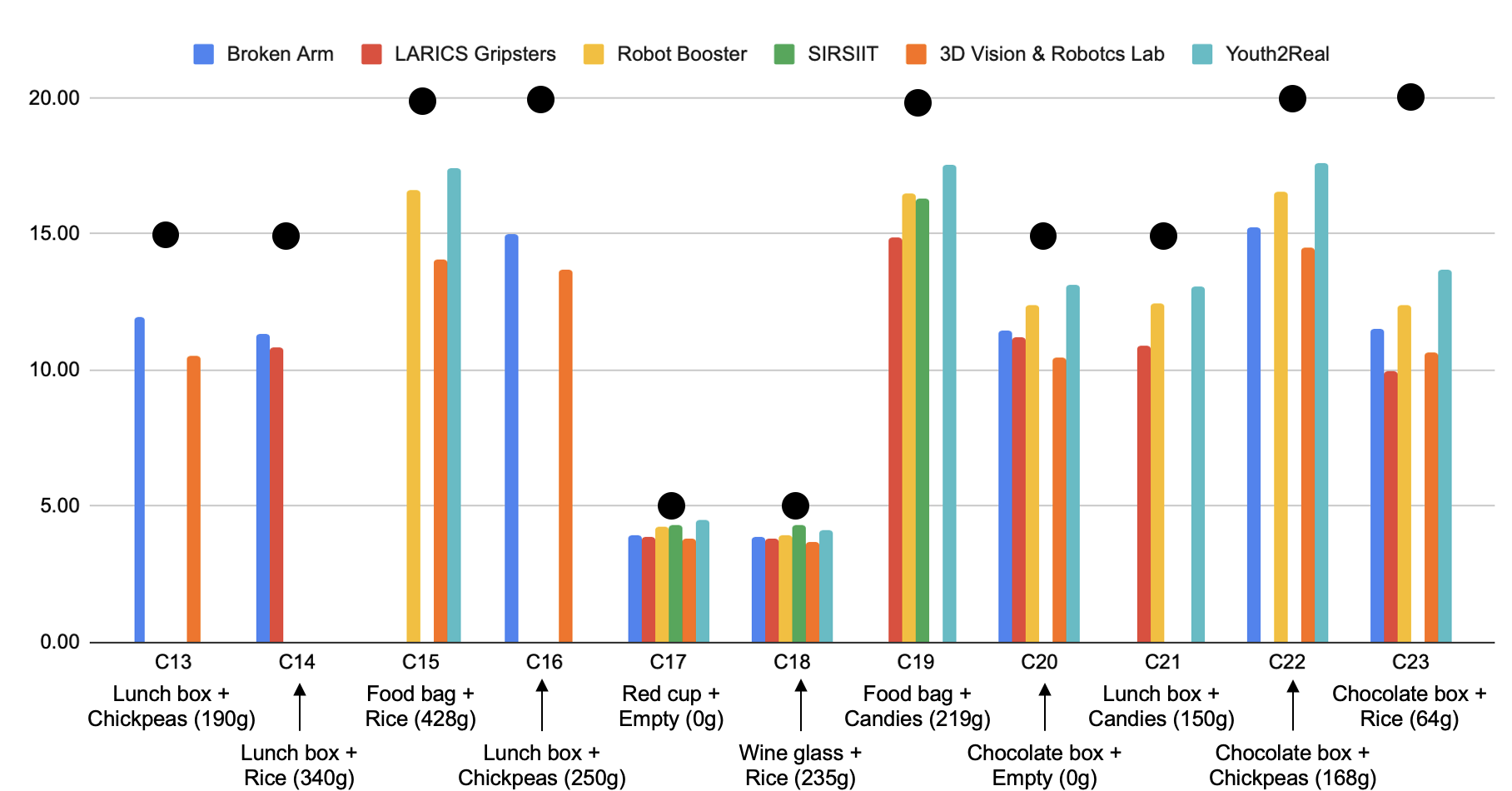
- Team Youth2Real successfully completed 21 out of 24 handover configurations; Robot Booster and LARICS Gripsters: 20 out of 24; Broken Arm: 18 out of 24; 3D Vision & Robotics Lab: 19 out of 14; and SIRSIIT: 15 out of 24.
Filled black circle denotes the configuration weight.
The following are instructions for each handover configuration (predefined combination of a container with a content type and amount). The operator is a person from the team who is responsible for controlling the execution of the handover configuration. For safety, another team member must be ready to stop the robot in case of an anomalous behaviour. The operator or any other team member helps prepare the handover configuration and reports the measures for evaluation. None of the team members can assist the robot during the handover execution. The volunteer is a person from another team who is responsible for performing the handover with the robot, and oversees the reported measures after the handover execution.
For the operator (or another team member)
Before starting the handover configuration:
- Prepare the container either empty or filled with its predefined content type and amount
- Weight the (filled) container before the execution of the task
- Place the container at the centre of the table, at a distance not reachable by the robotic arm (safety)
After the handover configuration is executed:
- Measure the delivery location of the container (if not failed)
- Weight the (filled) container after the execution of the task
- Report the measures in the .csv file to submit for evaluation (including handover timing)
During the handover execution:
- Control the start and end of the robotic control and perceptions
- Ready to stop the robot in case of an anomalous behaviour
For the volunteer
During the handover execution:
- The volunteer grasps the container from its location with a natural grasp
- The volunteer carries the container with the intention of handing it over to the robot
- The robot should track and predict the pose of the container to move the arm towards the handover area
- The volunteer hands the container over to the robot
- The robot closes the end effector and grasps the container
- The robot delivers the container upright at the predefined delivery location.
Note that the volunteer should avoid assisting the robot (i.e. remaining still at a location until the robot can pick up the container)
or assuming an adversarial behaviour (i.e. making it harder for the robot to reach the object).
The handover is supposed to be dynamic: robot starts moving and approaching as soon as the volunteer grasps the container.
This procedure has been revised from the CORSMAL Human-to-Robot Handover Protocol document.
- All configurations are executed by the same volunteer from another team using a natural grasp.
- The volunteer is instructed to use only one hand and always the same.
- Each handover configuration can be executed only once except for hardware failures
- The initial location of the container is predefined on the table and not reachable by the robotic arm to avoid the robot approaching the container before the volunteer graps it.
- Failed handover configurations will get 0 points. Example of failed configurations:
- Robot cannot grasp the object during the handover phase
- Robot cannot hold the container during the delivery phase
- Object falls after the robot places it on the table
- Volunteer retreats during the handover phase because of unsafe robot behaviour
- Perception system fails to detect the object for 2 consecutive attempts
- System crashes (e.g. hardware failures) or components fails to start (perception or robot) can be re-attempted.
After completing the set of configurations, teams will send a .csv file with the results for each configuration by email to the track organisers using the information below.
- The .csv file must be named according to the following format: teamname.csv (replace teamname with the name of your team).
- The .csv file must be formatted according to the templated provided and all the fields must be filled, also for failed configurations.
- Results must be reported with respect to their configuration id, even if executed in a different order.
- The initial measured mass of the containers with its content must be reported for all configurations.
- The target delivery location must be reported for each configuration.
- If the delivery is successful, the delivery flag must be set to 1. The provided template set the flag to the default value of 0 (corresponding to any failure).
- If the delivery is not successfull, then final measured mass must be -1 and the estimated delivery location must be -1 (for x, y, z)
- If there is no contact between the volunteer and the container, then both the human contact time and robot last contact must be set to -1.
- The robot last contact time must be greater than the human contact time with the container. We recommend to report the automatic measures of when the robot releases the gripper for the delivery. We also recommend to log the timings of the joint-states for any verification of the handover timing.
- Teams must capture a picture of the initial measures mass and final measured mass on the digital scale for each configuration, and of the delivery location if the delivery is successful.
- For reporting in future documents (technical report, website, blog post, manuscript for publication), we recommend to save videos of the handover executions, log calibration data, and any other relevant data for the analysis and discussion of the results, and reproducibility requests.
Organizers will provide the set of handovers configurations to fill the submission file on the competition day.
Downloads