Multimodal sensing and AI
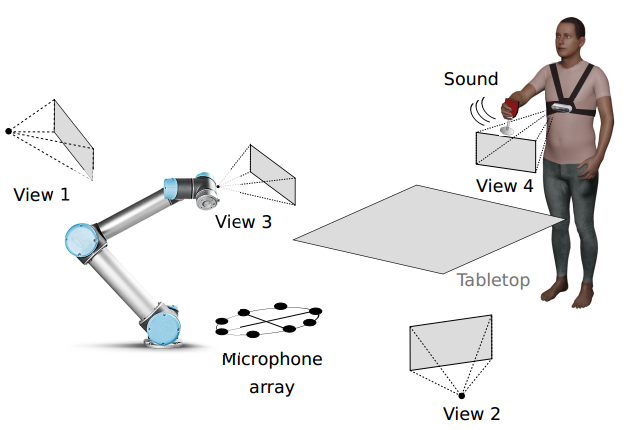
Fusing multiple sensing modalities (touch, sound, vision) to estimate the physical properties of objects (no prior knowledge)

Fusing multiple sensing modalities (touch, sound, vision) to estimate the physical properties of objects (no prior knowledge)

Handling dynamic, safety-critical transfers of unknown objects and the unpredictability of human movement
Building a community tha improves, shares, reproduces protocols, ML models, and data, and compares on our leaderboards the
Multimodal recordings of people (or a robot) manipulating objects, and real and mixed-reality images of handheld containers.
Browse datasetsHandover pipelines, real-to-simulation framework, robotic control algorithms, and perception models for object recognition.
Explore softwareEvaluation toolkit and leaderboards to compare methods on a standard benchmarking protocol designed for the task.
View protocol
Part of the 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Workshop details